Роботы
Pucks Harvester 2 📌
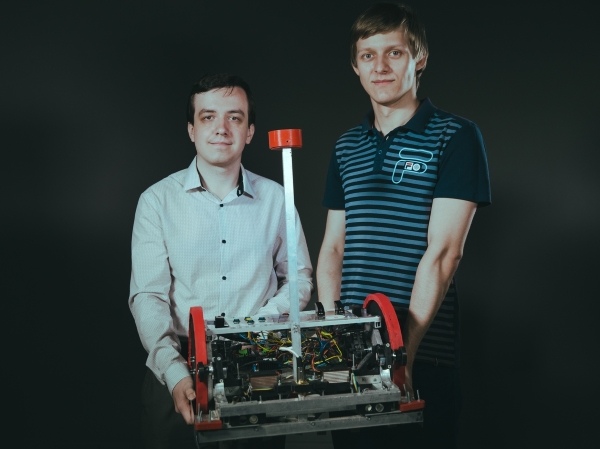
Наш самый “урожайный” робот в плане наград. Является дальнейшим развитием конструкции Puck Harvester с учётом обнаруженных недостатков конструкции и наших возросших технических возможностей.
Предназначен для участия в соревнованиях категории Puck Collect ("Робосортировка") и многократно занимал призовые места. Наиболее значимые победы:
- RobotChallenge 2018, Пекин, Китай (1-е место)
- RobotChallenge 2017, Пекин, Китай (2-е место)
- Robomaticon 2018, Польша, Варшава (1-е место)
Задачей роботов в категории Puck Collect является автономное перемещение по полю 2.5х2.5 метра и перемещение на базу (по двум противоположным углам игрового поля расположены квадратые базы роботов двух разных цветов соответствующего двух разным цветам шайб) пластиковых шайб правильного цвета (синие и красные) изначально случайно разбросанных по полю. За доставку шайбы своего цвета на свою базу начисляется 1 очко, за доставку шайбы чужого цвета на свою базу вычитается 1 очко (при этом не имеет значение робот какой команды доставил шайбу на каую базу, лишь совпадение цвета шайбы и цвета поверхности базы). На конструкцию роботов накладываются только ограничения по размеру (не более 40х40см) и безопасности (запрет использования двигателей внутренного сгорания и т. д.), а также запрещено ручное управление роботом во время раунда за исключением запуска и остановки.
Overlord 2
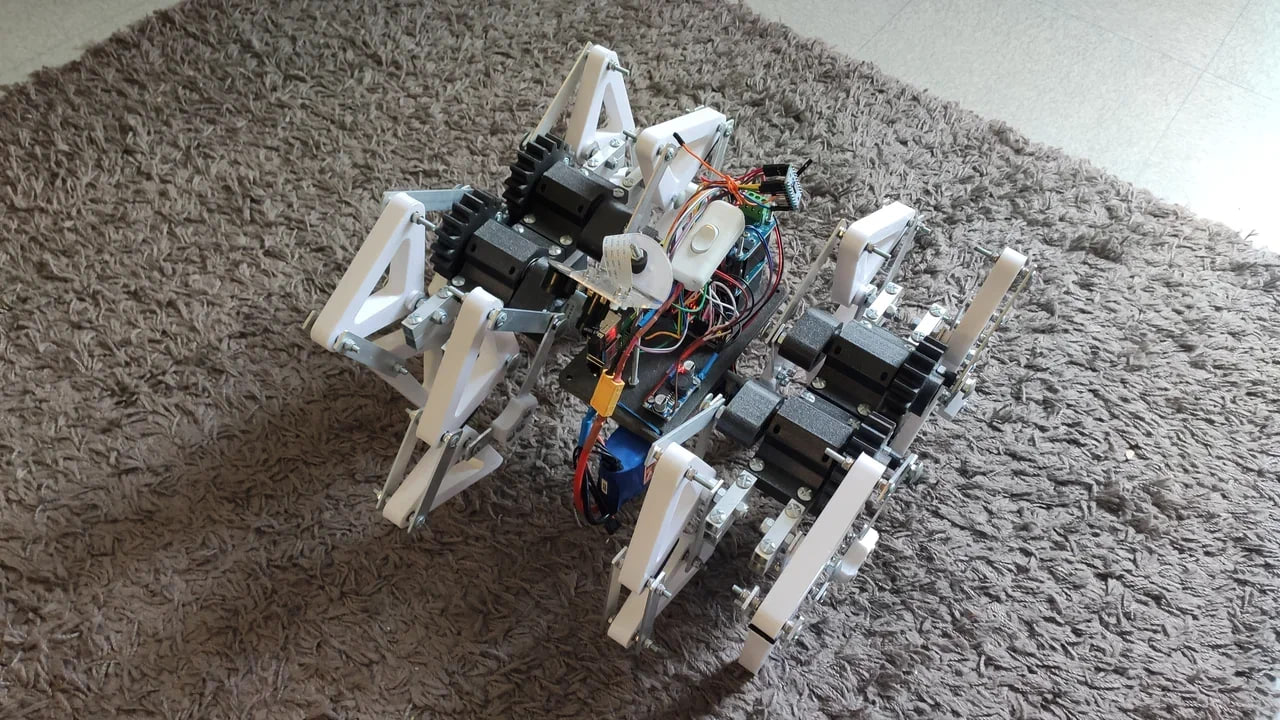
Overlord 2 – один из двух роботов, собранных нами во Франции, в Тулузе. Как и Overlord, предназначен для участия в соревнованиях следования по линии шагающих роботов. На этот раз, речь идёт о Toulouse Robot Race. К сожалению, соревнования были несколько раз перенесены из-за ограничительных мер, связанных с пандемией Covid-19, и в итоге мы приняли участие лишь в тестовом забеге. Однако, наш результат превосходил лучший результат прошлых лет :-)
Робот оборудован Raspberry Pi 4 и Raspbery Pi Camera Module. Для низкоуровневого управления двигателями используется Arduino Nano связанная с Raspberry Pi по последовательному порту.
Главным отличием от предыдущей версии робота является применение механизма Тео Янсена вместо механизма Чебышева. Более сложная конструкция требует деталей распечатанных на 3D-принтере, зато обеспечивает более эффективное и плавное движение. Таким образом наш робот способен перемещаться быстрее и с меньшим количеством вибраций.
Ping Master
Ping Master – робот для соревнований в категории Arkanoid, разработанный нами в 2017 году. В этой категории 2 робота соревнуются в игре похожей на настольный теннис. Сами роботы закреплены на рельсе на краю квадратного поля, по которой могут свободно перемещаться вдоль своей стенки. Задачей роботов является отбивать мячик отбитый противником не давая ему удариться о свою стенку и наоборот отбить мячик так, чтобы противник с ним уже не справился. Разумеется, роботы действуют автономно, а участие человека сводится к их запуску и остановке по тайм-ауту (3 минуты). Побеждает робот, который забил больше голов. Для удобства поле имеет небольшое возвышение посередине, чтобы мячик не мог остановиться между роботами.
Главным челленджем соревнования является определение роботом положения мячика на поле. Если на многих других соревнованиях робот является полностью самостоятельной единицей, то здесь большинство участников использует целый комплекс из робота, ноутбука и веб-камеры закреплённой над полем.
Killdozer

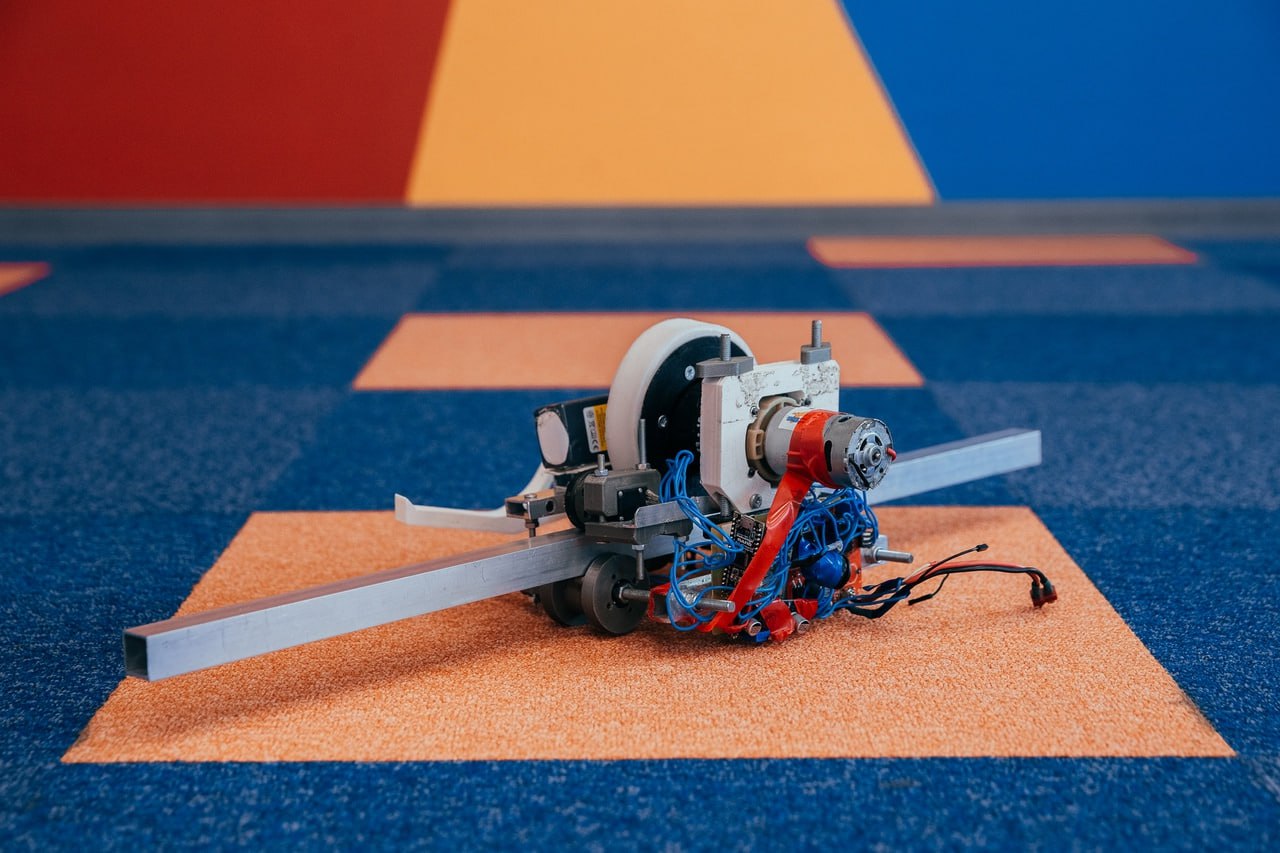
Одна из самых распространённых категорий робототехнических соревнований - РобоСумо. В этой номинации участвует два робота. Битва происходит на круглом поле стандартизированного диаметра. Края круга обозначены контрастным цветом (обычно круг чёрный, а граница круга белая или наоборот). Поле имеет определённую толщину возвышаясь над поверхностью, на которой оно установлено. Задачей одного робота является вытолкнуть другого за пределы круга, первый вышедший за пределы круга - проигрывает (победитель может установиться у черты, но обычно допускается тоже выкатиться за пределы круга, но вторым).
Номинация делится на весовые категории. Наш робот Killdozer участвовал в крупной весовой категории MegaSumo (вес до 3 кг). Оборудован моторами-редукторами от автомобильных стеклоподъёмников, двумя ультразвуковыми дальномерами HC-SR04, а для управления используется Arduino Nano.
При включении робот вращается, пока его дальномеры не обнаружат противника, затем робот на полной скорости движется вперёд. Специальный острый металлический ковш спереди робота позволяет ему поддеть противника и лишить его сцепления с поверхностью, в то время как колёса с покрышками отлитыми из двухкомпонентного силикона обеспечивают ему самому отличный контакт с поверхностью. Рама робота сделана из аллюминиевого профиля.
Overlord

Шагоход, участвующий в категории “Марафон шагающих роботов” фестиваля Robofinist.
Наш робот, использующий для движения механизм Чебышева, стабильно занимал призовые места в данном соревновании:
- Robofinist 2018, Санкт-Петербург, Россия (первое место)
- Robofinist 2016, Санкт-Перербург, Россия (первое место)
Задачей робота является следование по чёрной линии на белом полу. Роботы соревнуются по очереди, замеряется время прохождения круговой трассы с изогнутой линией. Может предоставляться несколько попыток, засчитывается лучшая.
Построен на базе Raspberry Pi 4 с USB-камерой, драйверах двигателей BTS7960 и двух моторах-редукторах. Использует библиотеку машинного зрения OpenCV для реализации распрознания линии.