Pucks Harvester
 Наш первый робот для участия в соревнованиях за пределами родного университета.
Наш первый робот для участия в соревнованиях за пределами родного университета.
Был изготовлен с использованием доступных нам в тот момент технологий и поэтому в конструкции по большей части используется дерево.
Стал победителем с первых же соревнований категории Puck Collect, в которых принял участие и долгое время оставался безусловным фаворитом, однако через несколько лет пальма первенства ушла обновлённой версии - Puck Harvester 2, однако первый робот продолжил участие в соревнованиях и иногда всё равно занимал первые места.
Наиболее значимой победой является третье место на RobotChallenge 2018 в Пекине, Китае.
Основные технические характеристики:
- 2 микроконтоллера - Arduino Uno (управление движением) и STM32F103 (управление сортировкой и открытием задней заслонки)
- 2 мотор-редуктора от автомобильных стеклоподъёмников
- 5 сервопривода - 2 для сортировки шайб и 3 для открытия задних стенок (фактически используется только один)
- 3 датчика цвета TCS230 - 2 для сортировки шайб и 1 для определения цвета пола
- 2 литий-полимерных аккумулятора 4S (14.8В) каждый ёмкостью 5000мАч
- LCD-дисплей с 3 кнопками для управления калибровкой
- Деревянная рама с небольшим применением аллюминиевых элементов
- Деревянные колёса с покрытием линолиуемом для улучшения сцепления
- RGB-подсветка с помощью светодиодной ленты - индицирует текущий цвет команды
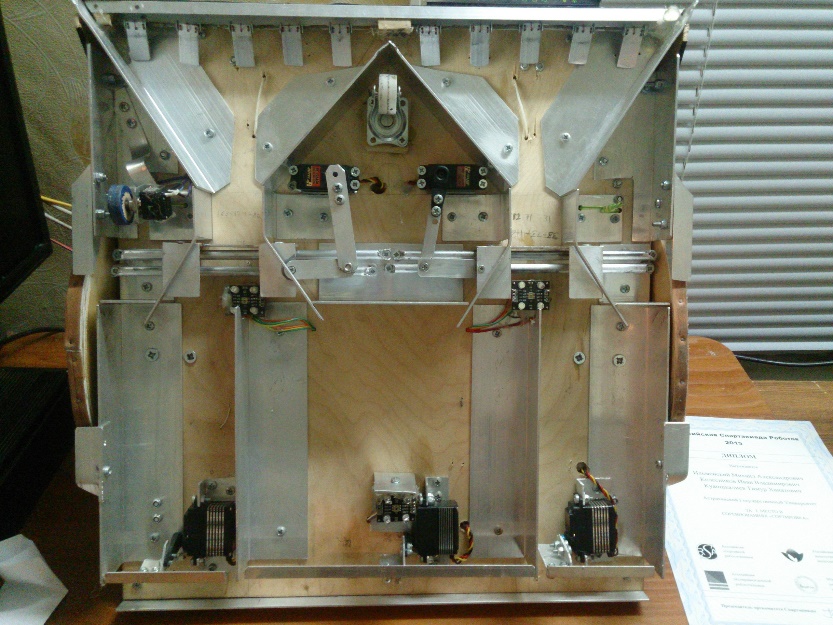
Робот не имеет нижней стенки и шайбы движутся внутри него своим ходом за счёт движения робота. В какой-то момент они направляются в один из двух сортировочных механизмов, где датчик цвета определяет цветовую принадлежность подъехавшей шайбы и направляют её в центральный бункер, если шайба нашего цвета, и один из боковых бункеров, если нет.
Когда робот достигает своей базы, датчик цвета по центру определяет этот факт и происходит открывание задней заслонки. Изначально планировалась возможность открытия также боковых распределителей (разумеется, не на своей базе, а где-нибудь в углу поля), но от неё было решено отказаться для повышения надёжности - сервоприводы так и не были подключены к питанию, а боковые заслонки жёстко зафиксированы механически.

Робот оснащён символьным LCD-дисплеем. С помощью простой (по сравнению с Pucks Harvester 2) системы меню возможна калибровка датчиков цвета каждого распределителя, а также задней датчика цвета пола. Помимо этого возможен просмотр текущий показаний датчиков цвета и вывод краткой информации об авторах робота.
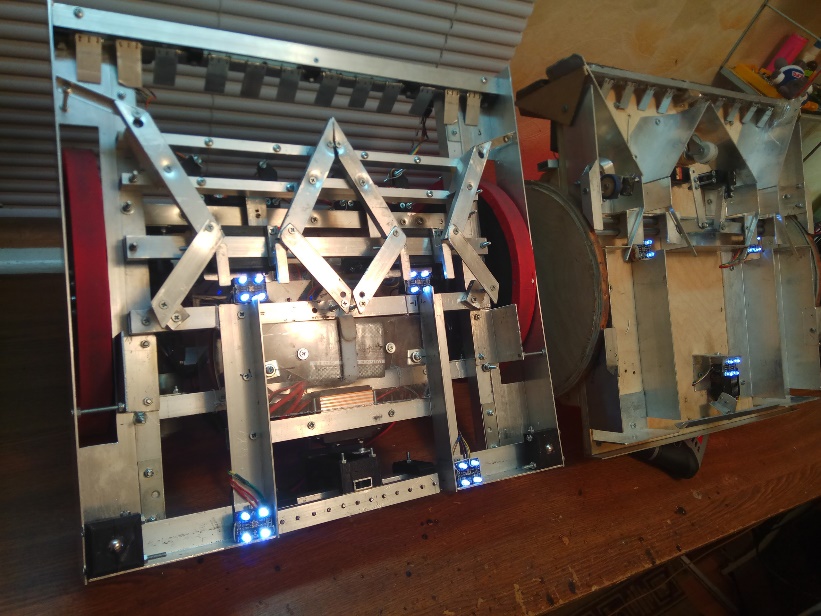
Примерно через 1.5-2 года после создания Pucks Harvester был сконструирован и изготовлен новый робот - Pucks Harvester 2, который перенял много особенностей предшественника, но в то же время получил и множество улучшей с учётом возросших технических возможностей и опыта эксплуатации первого робота. Например, был серьёзно переделан механизм выгрузки шайб - во-первых, использовано два датчика цвета вместо одного, во-вторых, предусмотрена защита от застревания шайбы в ситуации если робот покидает базу и начинает закрывать заслонку, когда шайба уже находится на полпути. В Pucks Harvester более примитивный механизм заслонки мог иногда приводить к застреванию робота на шайбе.

Несмотря на то, что была создана новая версия робота, робот Pucks Harvester продолжил принимать участие в соревнованиях наравне со второй версией при условии наличия технической возможности привезти обоих роботов (например, на соревнованиях Robomaticon 2018 в Варшаве, Польше, такой возможности не было, поскольку на учёбу в Софию-Антиполис исходно был взят с собой только один робот).