Меня зовут Иван Колесников, мне 27 лет и я живу во Франции с 4 сентября 2020 года.
Я окончил второй год магистратуры Computer Science for Aerospace в Paul Sabatier University в Тулузе, затем попробовал себя в роли исследователя в том же университете, но в итоге с 2022 года я вернулся к карьере разработчика, переехав в Ниццу.
До того как я переехал в эту страну, я окончил магистратуру “Информационные системы и технологии” в Астраханском государственном университете и бакалавриат “Мехатроника и робототехника” там же.
В ходе обучения на бакалавриате и магистратуре я принимал участие в многочисленных олимпиадах и конкурсах по робототехнике и программированию. Наиболее значимые, по моему мнению, мероприятия - RobotChallenge (Пекин, Китай, первое место в 2018 году и второе место в 2017 году), Robomaticon (Варшава, Польша, первое место в 2018 году) и ACM ICPC (наша команда дважды выходила в полуфинал чемпионата мира в Санкт-Петербурге и получала диплом третьей степени). Помимо этого, мы многократко занимали призовые (преимущественно первые) места на таких соревнованиях как Robofinist, Всероссийская спартакиада роботов и т. д. С некоторыми из наших роботов можно познакомиться здесь.
Важно отметить, что большинство моих достижений было не в одиночку, а в составе команды, куда неизменно входил мой лучший друг и коллега Михаил Ильменский. Мы учились вместе на бакалавриате и обеих магистратурах, затем он перебрался на год в Париж, но сейчас тоже живёт в Ницце.
Помимо учёбы и текущей работы у меня есть полтора года официального опыта работы Java бекэнд разработчиком и трудно поддающийся точному подсчёту опыт фриланса. Я увлекаюсь программированием, электроникой и робототехникой.
Исполнуяю роль Vice President of Education на 2023-2024 год в клубе Toastmasters Nice.
В большинстве западных стран применяется прогрессивная шкала налогообложения про которую ходит много легенд (вполне обоснованных, но есть нюансы) какие большие налоги получаются по сравнению с Россией с плоской шкалой 13%. В этой статье мы обзорно рассмотрим налоговые системы десяти стран Европы (в целях простоты рассматриваются только страны Западной Европы и из рассмотрения исключаются карликовые государства, а также Швейцария, потому что там всё слишком сложно): Франция, Германия, Италия, Испания, Ирландия, Нидерланды, Бельгия, Португалия, Австрия, Великобритания.
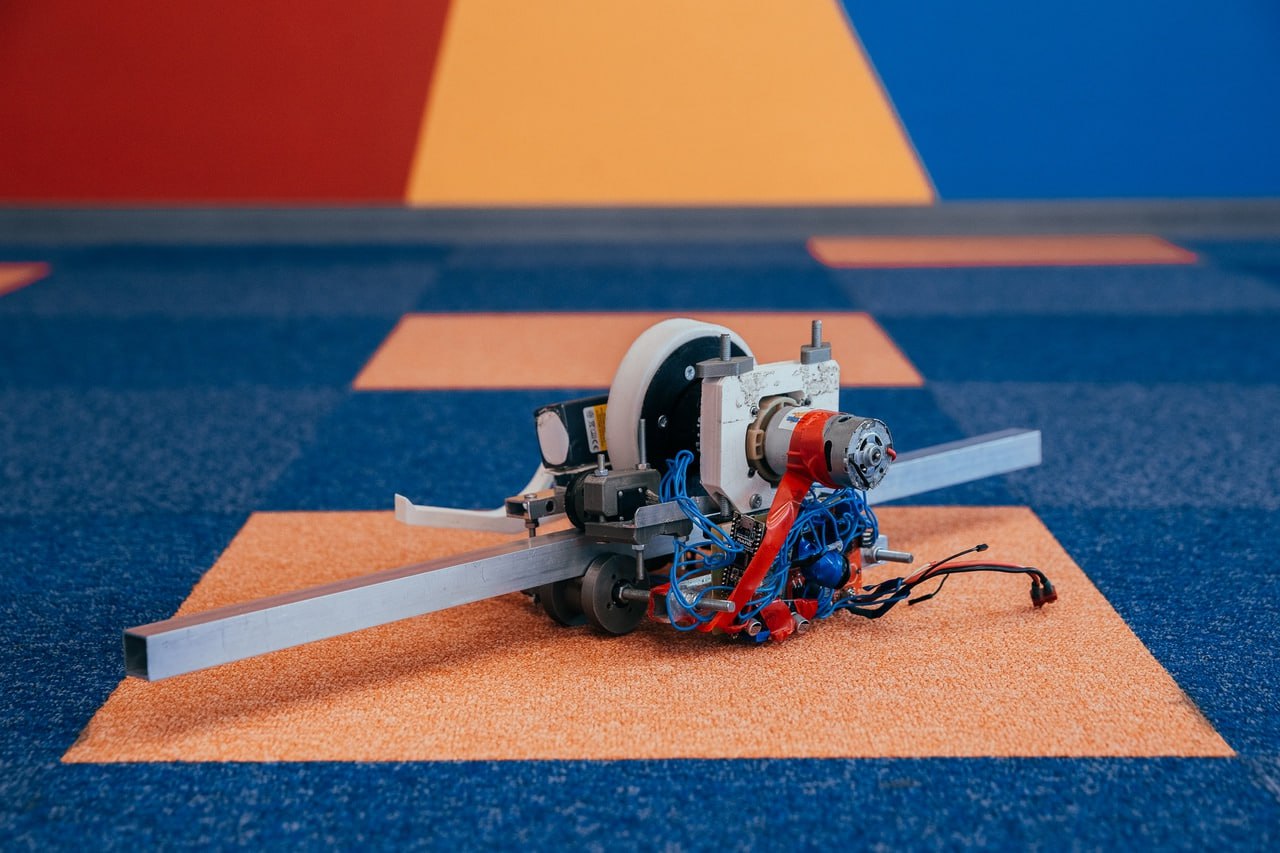
Overlord 2 – один из двух роботов, собранных нами во Франции, в Тулузе. Как и Overlord, предназначен для участия в соревнованиях следования по линии шагающих роботов. На этот раз, речь идёт о Toulouse Robot Race. К сожалению, соревнования были несколько раз перенесены из-за ограничительных мер, связанных с пандемией Covid-19, и в итоге мы приняли участие лишь в тестовом забеге. Однако, наш результат превосходил лучший результат прошлых лет :-)
Робот оборудован Raspberry Pi 4 и Raspbery Pi Camera Module. Для низкоуровневого управления двигателями используется Arduino Nano связанная с Raspberry Pi по последовательному порту.
Главным отличием от предыдущей версии робота является применение механизма Тео Янсена вместо механизма Чебышева. Более сложная конструкция требует деталей распечатанных на 3D-принтере, зато обеспечивает более эффективное и плавное движение. Таким образом наш робот способен перемещаться быстрее и с меньшим количеством вибраций.
Ping Master – робот для соревнований в категории Arkanoid, разработанный нами в 2017 году. В этой категории 2 робота соревнуются в игре похожей на настольный теннис. Сами роботы закреплены на рельсе на краю квадратного поля, по которой могут свободно перемещаться вдоль своей стенки. Задачей роботов является отбивать мячик отбитый противником не давая ему удариться о свою стенку и наоборот отбить мячик так, чтобы противник с ним уже не справился. Разумеется, роботы действуют автономно, а участие человека сводится к их запуску и остановке по тайм-ауту (3 минуты). Побеждает робот, который забил больше голов. Для удобства поле имеет небольшое возвышение посередине, чтобы мячик не мог остановиться между роботами.
Главным челленджем соревнования является определение роботом положения мячика на поле. Если на многих других соревнованиях робот является полностью самостоятельной единицей, то здесь большинство участников использует целый комплекс из робота, ноутбука и веб-камеры закреплённой над полем.

 Недавно столкнулся с проблемой подружить веб-фреймворк
Недавно столкнулся с проблемой подружить веб-фреймворк