Роботы
Puck Collect 🖿
Категория робототехнических соревнований, где два автономных робота соревнуются в скорости и качестве сборка и сортировки по цвету красных и синих пластиковых шайб
Pucks Harvester
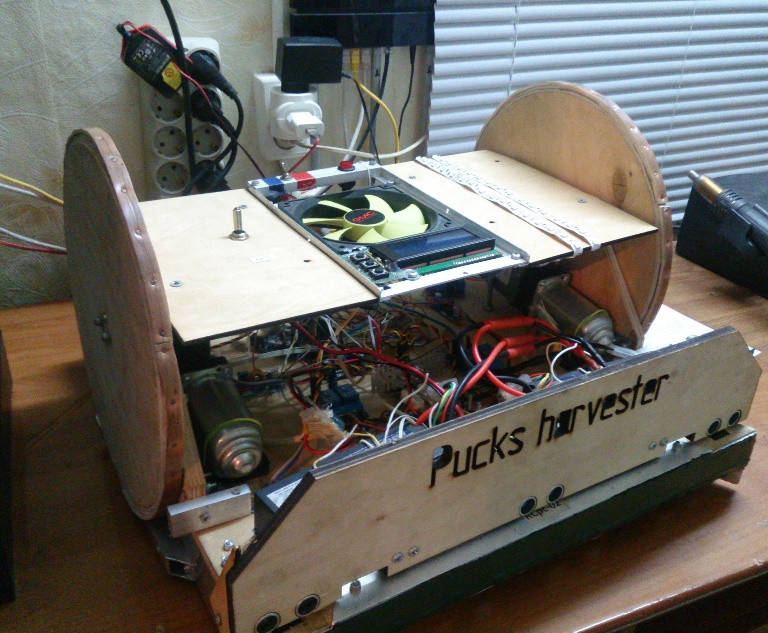 Наш первый робот для участия в соревнованиях за пределами родного университета.
Наш первый робот для участия в соревнованиях за пределами родного университета.
Был изготовлен с использованием доступных нам в тот момент технологий и поэтому в конструкции по большей части используется дерево.
Стал победителем с первых же соревнований категории Puck Collect, в которых принял участие и долгое время оставался безусловным фаворитом, однако через несколько лет пальма первенства ушла обновлённой версии - Puck Harvester 2, однако первый робот продолжил участие в соревнованиях и иногда всё равно занимал первые места.
Наиболее значимой победой является третье место на RobotChallenge 2018 в Пекине, Китае.
Работает на базе двух микроконтроллеров - Arduino Uno (выполняет управление движением) и STM32F103 (выполняет управление сортировкой и открытием задней заслонки).
Оборудован символьным LCD-дисплеем с тремя кнопками, позволяющими выполнять калибровку робота на цвета перед соревнованиями. Также имеет RGB-подсветку, которая индицирует цвет текущей команды, переключаемый тумблером. Как и новая версия, имеет компоновку с двумя распределительными механизмами, центральным накопителем шайб для шайб правильного цвета и двумя боковыми для шайб цвета неправильного.